|
SISTEMI DI
LOCALIZZAZIONE |
||||||||||||||||||||||||||||
|
Nella nostra vita di tutti i giorni e nella nostra
attività radioamatoriale parliamo sempre più spesso di sistemi di
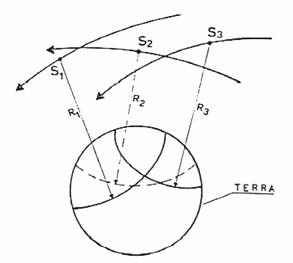
localizzazione ed in particolare di GPS. Il Sistema Navstar-GPS è costituito da una costellazione di 24 satelliti, controllati dallo US Department of Defence. Di questi satelliti, 21 sono attivi, mentre tre sono di scorta, cioè sono in attesa di entrare in funzione quando qualcuno dei 21 cesserà di essere attivo. GPS è un acronimo derivato da Global Position System. Il sistema GPS è stato sviluppato, inizialmente con scopi militari, negli USA. Anche l’Unione Sovietica si è dotata di un sistema analogo, il GLONAS (GLObal NAvigation System) pressoché uguale al GPS, ma sprovvisto di oscillatori al cesio. Tra i paesi Europei, la Germania ha sviluppato un proprio sistema satellitare simile al GPS, chiamato NAVSAT Le orbite del sistema GPS sono giacenti su tre piani inclinati di 55° rispetto all’asse terrestre (piano equatoriale). I piani orbitali sono 6; ogni satellite giace a circa 20200 km dalla superficie terrestre ed è dotato di 3 orologi al cesio. Teoricamente, all’orizzonte del veicolo dovranno essere presenti contemporaneamente un numero di satelliti maggiore o uguale a quattro. Il sistema satellitare GPS è anche definito sistema circolare ad una via. “Circolare” in quanto sfrutta l’intersezione delle sfere, “ad una via” poiché la localizzazione avviene con la sola ricezione del segnale del satellite. Ciò consente un numero illimitato di utenti, oltre, naturalmente, alla segretezza della localizzazione. Non va dimenticato che il GPS ha origini puramente militari, e che la rivelazione al pubblico di parte dei codici è avvenuta in seguito all’abbattimento dell’aereo sudcoreano della KAL che, per errore di posizione, ha sorvolato il territorio sovietico nella notte del 3 settembre 1983. La distanza del ricevitore da questi satelliti andrà determinata attraverso le trasmissioni radio effettuate da ogni singolo satellite. Ogni satellite emette, sempre via radio, dati codificati atti a calcolare la propria posizione nell’orbita di appartenenza. Figura 1 Satellite GPS La codifica dei segnali trasmessi dal satellite sfrutta i codici quasi-aleatori. Il segnale così codificato è del tutto simile al rumore bianco. Solo conoscendo la giusta codifica è possibile estrarre l’informazione desiderata. In pratica, al segnale utile viene aggiunto un rumore (ovvero una sequenza pseudocasuale) generato con un algoritmo noto. La conoscenza completa o parziale di questo rumore determina il livello di accuratezza nella determinazione del punto. Va notato che, sfruttando i codici quasi-aleatori, si riesce ad ottenere il segnale utile, anche quando questo è praticamente pochi dB sopra al rumore del canale. Teoricamente con tre sfere è possibile effettuare il punto, con l’ipotesi di conoscere senza errore le tre sfere. Nella pratica si usano quattro sfere, per compensare le inevitabili differenze di sincronismo fra il Master Clock GPS ed il clock del ricevitore. Il Master Clock GPS rappresenta l’oscillatore di riferimento per la costellazione dei satelliti GPS. La scelta del Master Clock avviene mediante complessi algoritmi di stima della deriva dei vari oscillatori presenti nei vari satelliti. Il migliore oscillatore viene così eletto a Master Clock GPS. Va notato che tale scelta può essere variata dinamicamente, non appena viene identificato un oscillatore con deriva migliore di quella correntemente nota. Nella Figura 2 vediamo la schematizzazione dell’intersezione di tre sfere. Figura 2 Intersezione di tre sfere nel sistema GPS Operando in questo modo si riesce a garantire una buona precisione, pur con oscillatori locali di qualità non elevata (generalmente si usano oscillatori al quarzo, con precisione tipica 10-5 - 10-6). Con complessi algoritmi di calcolo alcuni ricevitori GPS riescono a fare il punto anche solo con tre sfere, “ricordando” una precedente orbita misurata. Va comunque precisato che una ridondanza della misura (ovvero misura effettuata con più di quattro satelliti) porta ad un aumento della precisione. I satelliti, dotati ognuno di orologio atomico al cesio, vengono sincronizzati dalla stazione americana di Colorado Spring, e trasmettono in continuazione dati numerici che comprendono le proprie coordinate e l’istante esatto di trasmissione. Questi dati vengono elaborati a terra dal ricevitore il quale li confronta con il proprio riferimento di tempo locale, generato con un buon oscillatore al quarzo. Conoscendo la velocità di propagazione delle onde elettromagnetiche, è possibile calcolare a che distanza si trova il ricevitore da ognuno dei satelliti dei quali sta ricevendo il segnale. La conoscenza della distanza da un solo satellite è un dato insufficiente. (potremmo essere in un punto qualsiasi della superficie di una sfera centrata sul satellite e di raggio pari alla distanza calcolata…). In altre parole ci mancano le informazioni sugli angoli azimutali e zenitali. L’intersezione di tre sfere da come soluzione due punti. Uno è sicuramente da scartare, in quanto non si trova sulla superficie terrestre, mentre l’altro è il punto utile. Con l’intersezione di quattro sfere, possiamo calcolare univocamente il punto nello spazio, anche se dobbiamo attendere di avere nella porzione di cielo visibile almeno 4 satelliti. Ciò comporta un tempo di attesa dell’ordine di grandezza dei minuti, sia per la ricezione dei segnali sia per lo svolgimento delle operazioni di calcolo. I dati del quarto satellite consentono, inoltre, il calcolo di un fattore di correzione da applicare al clock locale, al fine di migliorare la precisione delle successive misurazioni. I dati che si ottengono da un ricevitore GPS sono: longitudine, latitudine, altezza sul livello del mare, e tempo. I ricevitori commercialmente disponibili sono di due tipi, monocanale e pluricanale. I primi “vedono” i satelliti sequenzialmente, e sono intrinsecamente lenti; i secondi, pur con una sola antenna, possono “vedere” contemporaneamente fino a 10-12 satelliti. Ovviamente questi modelli sono particolarmente indicati per la localizzazione di mezzi veloci. Appare chiaro che per il regolare funzionamento del ricevitore occorre essere all’aperto, in posizione tale da “vedere” i satelliti. Tipicamente, comunque, i ricevitori commerciali offrono una precisione dell’ordine del centinaio metri con un tempo di acquisizione dell'ordine della decina di secondi e possibilità di osservazione di un numero massimo anche di 12 satelliti. Nel caso di ricevitori militari la precisione sale notevolmente, grazie ai codici di localizzazione estremamente più precisi, attualmente non ancora rilasciati per scopi civili.
Il Loran-C è un sistema di navigazione iperbolico a onda chilometrica nel quale la posizione viene calcolata dai tempi di propagazione di segnali impulsivi. Rispetto ad altri sistemi analoghi, la caratteristica saliente consiste nella misura di tempo e, di conseguenza, anche di posizione. La trasmissione del segnale radio avviene ad una frequenza di 100 kHz. Le stazioni trasmittenti sono una ottantina, sparse nel mondo. Vengono emesse sequenze di impulsi con una cadenza che è chiamata GRR (Group Repetition Rate). Viene anche utilizzata una grandezza detta GRI (Group Repetition Interval) definito come l’inverso di GRR. Associato al Loran-C è il concetto di catena. Con il termine catena si intende un gruppo di 3-5 trasmettitori che copre una certa area geografica. Uno di questi è chiamato master, è collocato in posizione centrale ed ha alcune funzioni privilegiate; gli altri sono denominati slave o secondary, sono collocati a distanze di circa 500-1000 km dal master e sono sincronizzati ad esso. Le diverse catene sono caratterizzate da GRI diversi, nel campo tra 49 e 100 ms; nell’ambito di una catena, i segnali delle singole stazioni sono separati nel dominio del tempo. La trasmissione di una slave consta di un treno formato da 8 impulsi spaziati di 1 ms, ripetuti ogni GRI; il segnale master comprende un impulso addizionale, ritardato di 2 ms dall’ultimo che costituisce il treno. Il ritardo dei segnali slave è determinato come somma del tempo di propagazione del master e di un ritardo fisso, detto coding delay identificativo della stazione. Ogni stazione slave è sincronizzata al master in quanto ne attende il segnale prima di trasmettere il proprio; l’incertezza della sincronizzazione è di 50-100 ns. Il coding delay è stabilito in modo che le emissioni delle stazioni di una catena siano separate di quanto è sufficiente, affinché nella zona coperta dal servizio non si possa verificare una sovrapposizione di segnali. Al ricevitore arrivano i segnali trasmessi, attenuati e ritardati secondo la distanza da ciascuna stazione. Nella tabella che segue vengono fornite le caratteristiche dei trasmettitori della catena del Mediterraneo.
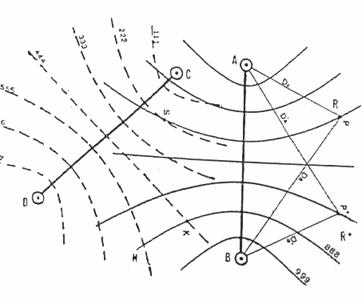
Tabella 1 - Stazioni Loran-C della catena del Mediterraneo La propagazione avviene per onda di superficie, anche se l’onda ionosferica è sempre presente nel segnale ricevuto con una intensità che può essere assai superiore a quella del primo segnale, soprattutto di notte. Nei primi 40ms (o più, a brevi e medie distanze) il segnale è costituito dalla sola onda di superficie, più stabile dell’onda ionosferica. Il sistema Loran-C è stato inizialmente sviluppato per la navigazione in mare. è noto anche come sistema di navigazione "iperbolico", in quanto il punto del mezzo mobile avviene per intersezione di iperboli. Le iperboli sono identificate dai luoghi a ritardo costante di una stessa emissione radio. Ogni coppia di iperboli è originata dal master e da uno slave. Va notato che la frequenza di 100 kHz appartiene alle Onde Lunghe (LW) ed è quindi facile capire come disomogeneità orografiche vadano ad alterare i risultati della misura, rendendo affidabile il Loran-C solo per uso nautico. A titolo informativo si può indicare la precisione in ±300 metri, limitatamente alla superficie marina. Da prove effettuate in campo automobilistico è stata dimostrata l’applicabilità del Loran-C, purché la velocità del veicolo non sia superiore a circa 100 km/h, e il segnale non abbia a mancare per un tempo superiore alla decina di secondi. Verrà ora illustrato con un breve esempio come opera un ricevitore Loran-C, facendo riferimento alla Figura 3 che segue. Figura 3 Sistema Loran C: la geometria delle iperboli. La Figura 3 mostra una porzione di mappa geografica contenente due coppie di stazioni a terra: A-B e C-D (A è la stazione Master, mentre B è la stazione Slave). Facendo riferimento alla coppia A-B si vede come, per esempio, nel punto P arrivino prima i segnali di A e poi quelli di B, in quanto la distanza A-P è minore della distanza B-P. Con questa geometria vi sono infiniti punti che ricevono i segnali di B (rispetto ad A) con lo stesso ritardo del punto P. Questi punti generano il ramo R dell’iperbole i cui due rami sono contrassegnati da R ed R+. Misurando il ritardo con il quale si ricevono i segnali di una stazione (per esempio A) rispetto all’altra (B), si determina su quale iperbole giace il punto nel quale si effettua la misura. Per stabilire univocamente il punto P occorre una seconda iperbole che si determina allo stesso modo, facendo riferimento ad una seconda coppia di stazioni (nel nostro esempio C e D). Se si misurasse per la coppia A-B il ritardo (espresso per questa figura in termini convenzionali) 888 e per la coppia C-D il ritardo 555, il punto dal quale è stata effettuata la misurazione risulta essere il punto contrassegnato con H.
|
||||||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||||||